




 更新时间: 2024-06-23 来源:
更新时间: 2024-06-23 来源:转换为相应的角位移或线位移。这种电动机的显著特点是每当输入一个电脉冲信号时,它就会按照预定的角度或距离进行一步动作,因此得名“步进电机”。
步进电机的基本构造包括一个定子和一个转子,定子通常包含多个电磁线圈,而转子则由一系列磁极组成。通过依次激励不同的定子线圈,可以精确地控制转子的角位移。同时,步进电机的输出角位移或线位移与输入的脉冲数成正比,转速则与脉冲频率成正比,这使得步进电机具有极高的位置控制精度和可重复性。
步进电机在许多领域都有广泛的应用,包括数字控制机床、医疗设施、家电、汽车、工业自动化自动化设备机器人、3D打印机等。在数字控制机床制造领域,步进电机可以直接将数字脉冲信号转化为角位移,是数字控制机床最为理想的执行元件。在医疗设施中,步进电机能轻松实现精准定位和快速响应,提高设备的性能和效果。
可变磁阻步进电机:它们具有铁芯转子,该转子被定子磁极吸引,并通过定子和转子之间的最小磁阻提供运动。
双极步进电机:此类电机的定子线圈没有共用电线。这类步进电机的驱动方法不一样且复杂,假如没有微控制器驱动电路也很难设计。
单极步进电机:在这种类型的步进电机中,我们大家可以将两个相绕组的中心抽头用于公共接地或公共电源,如下所示。这使得驱动电机变得很容易,单极步进电机也有很多类型

步进电机的工作方式与直流电刷电机不同,直流电刷电机在端子上施加电压时旋转。另一方面,步进电机实际上具有围绕中心齿轮形铁片排列的多个带齿电磁体。电磁体由外部控制电路(例如微控制器)供电。
为了使电机轴转动,首先给一个电磁体通电,使齿轮的齿被磁力吸引到电磁体的齿上。当齿轮的齿与第一个电磁体对齐时,它们与下一个电磁体稍微偏移。因此,当下一个电磁体打开并且第一个电磁体关闭时,齿轮会稍微旋转以与下一个电磁体对齐,并从那里重复该过程。每一次轻微的旋转称为一个步骤,整数个步骤构成一次完整的旋转。
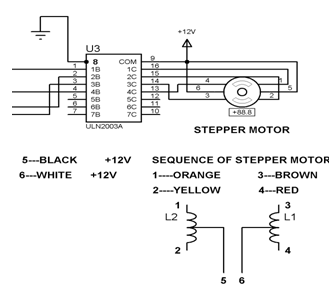
这样,电机就可以精确转动。步进电机不是连续旋转,而是步进旋转。 定子上固定有4个相互成90° 角的线圈。步进电机连接由线圈的互连方式决定。在步进电机中,线圈没有连接。电机具有 90° 旋转步长,线圈按循环顺序通电,确定轴旋转方向。
通过操作开关来显示该电机的工作情况。线 秒的间隔串联激活。 每次激活下一个线° 。其低速扭矩将直接随电流变化。
简单的 555定时器步进电机控制器电路采取少量易于使用的组件进行设计。该电路使步进电机连续驱动,没有一点中断或步进停止。利用该电路,我们大家可以驱动具有不一样额定电压的单极步进电机。请记住,该电路仅使用 9V 电源,还可以驱动 12V 以下的步进电机。如果要驱动高于 12V 的步进电机,请为步进电机和功率开关晶体管添加外部电源。
该电路有两部分,一部分用于产生方波脉冲振荡,另一部分用于向步进电机提供步进脉冲。
我们知道步进电机也称为步进电机,大多数是无刷直流电机,将其整个旋转分成多个相等的步数,该电机可用于不同的应用,如3D打印机、数字控制机床、自动门等..,
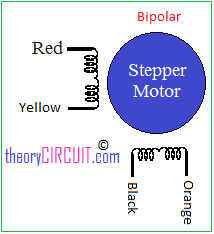
双极步进电机每相只有一个绕组,只有4根引线连接两组内部电磁铁线圈,能够最终靠改变通过电机线圈的电流方向来实现正向和反向步进,这可能比单极更复杂,但H-电桥和步进电机驱动电路使其变得很简单。
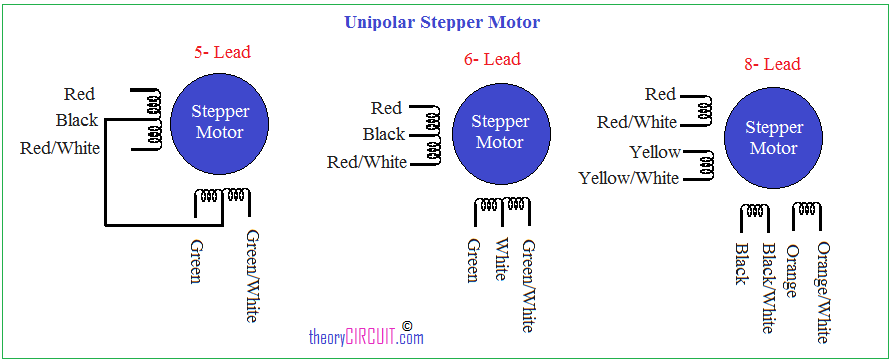
单极配有 5、6 和 8 根引线,并通过每相输入的中心抽头运行一个绕组。此图显示了不一样的单极步进电机及其引线配置,请参阅步进电机的数据表以知道更多信息。
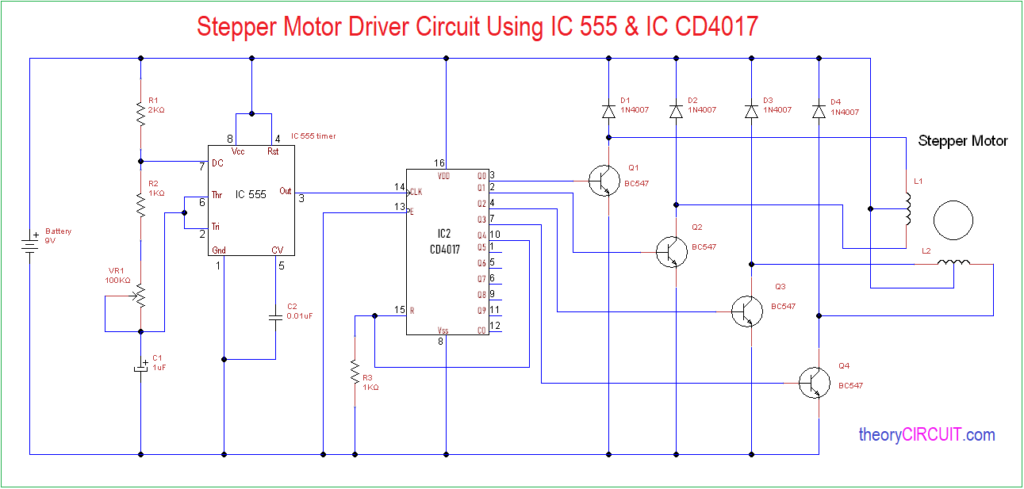
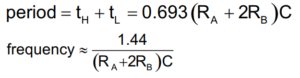
这里,定时器IC555用作非稳态多谐振荡器,并基于定时电阻器和定时电容器振荡方波脉冲。
第二级是十进制计数器IC CD4017级,该集成电路对来自定时器IC的方波脉冲进行计数,并通过Q0、Q1、Q2和Q3输出引脚提供步进脉冲输出,每个脉冲通过开关晶体管BC547馈送到步进电机线圈。
当脉冲和电源施加到步进电机时,其转子开始旋转,转子的速度能通过VR电阻来改变。
